快速Cadzow算法及梯度变体
本文最后更新于:2021年6月16日 中午
写在前面
最近又看了大牛Jian-Feng Cai[1]的系列文章,先占一个坑[2],这个与以前的Cadzow算法有关系,以后慢慢补充大牛的其他文章。
符号介绍
考虑下面一维信号含噪模型 \[ \boldsymbol{y} = \boldsymbol s +\boldsymbol e \] Cadzow去噪法基于干净信号\(\boldsymbol s\)的Hankel矩阵低秩性质进行截断奇异值分解。首先对复信号\(\boldsymbol z\)进行Hankel化(Hankelization) \[ \mathcal H \boldsymbol z = \begin{bmatrix} z_0 & z_1 & z_2 & \cdots & z_{K-1}\\ z_1 & z_2 & z_3 & \cdots & z_{K}\\ z_2 & z_3 & z_4 & \cdots & z_{K+1}\\ \vdots & \vdots & \vdots & \vdots & \vdots\\ z_{L-1} & z_{L} & z_{L+1} & \cdots & z_{N-1} \end{bmatrix} \] 其逆过程记为\(\mathcal H^\dagger\),对给定矩阵\(Z\in\mathbb C^{L\times K}\)进行反对角平均。记第\(a\)个反对角线上元素个数为 \[ w_a = \#\left\{ (i,j)~|~ i+j=a,~ 0\leq i\leq L-1,~0\leq j\leq K-1\right\} \] 去Hanekl化得到的向量\(\mathcal H^\dagger Z\)的第\(a\)个元素为 \[ [\mathcal H^\dagger Z]_a=\frac{1}{w_a} \sum_{i+j=a}[Z]_{ij} \] 注意: \(\mathcal H^\dagger\mathcal H=\mathcal I\)为恒等映射,而\(\mathcal P_{\mathcal M_{\mathcal H}} = \mathcal H\mathcal H^\dagger\)为矩阵到Hankel矩阵空间\(\mathcal M_{\mathcal H}\)的投影。
Cadzow算法
前面提到Cadzow去噪的核心思想,假设\(\text{rank}(\mathcal H\boldsymbol x)=r \ll\min{(L,K)}\),而\(\text{rank}(\mathcal H\boldsymbol y)=\min{(L,K)}\)。因此从\(\boldsymbol y\)到\(\boldsymbol x\)需要进行降秩。令\(\boldsymbol z_0 = \boldsymbol y\),通过如下迭代 \[ \boldsymbol z_{k+1} = \mathcal H^\dagger\mathcal T_r\mathcal H\boldsymbol z_k,~k=0,\cdots \] 其中\(\mathcal T_r\)为奇异值分解\(Z=\sum_{j=1}^{\min(L,K)}\sigma_j\boldsymbol{u}_j\boldsymbol{v}_j^*\)的截断形式,记秩\(r\)矩阵集合为\(\mathcal M_r\) \[ \mathcal{T}_r(Z)=\sum_{j=1}^r\sigma_j\boldsymbol{u}_j\boldsymbol{v}_j^*\in\mathcal M_r \] 截断奇异值分解过程可视为矩阵到\(\mathcal M_r\)的投影,记为\(\mathcal P_{\mathcal M_r}\)。
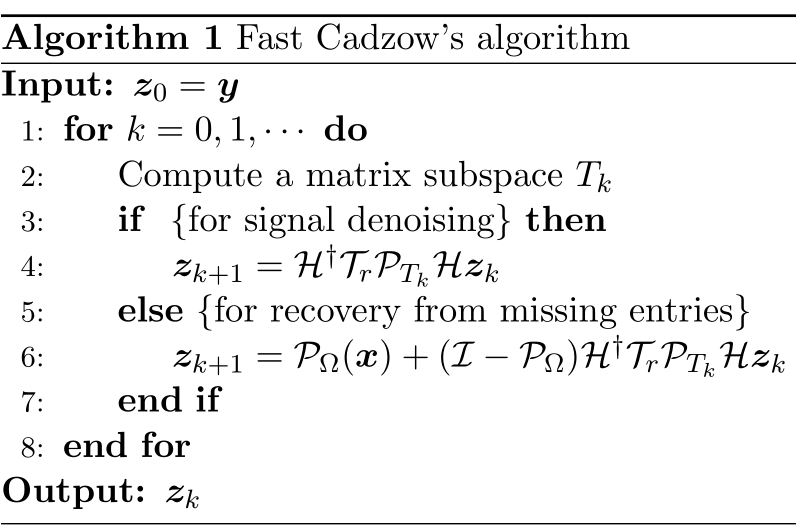
值得注意的是,Cadzow算法是多通道奇异谱分析,且Cadzow算法的第一次迭代与奇异谱分析完全一致。此外,Cadzow算法与交替投影相关。令\(Z_k = \mathcal H\boldsymbol z_k\),Cadzow算法的矩阵表示形式如下 \[ Z_{k+1} = \mathcal P_{\mathcal M_H}\mathcal P_{\mathcal M_r}Z_k,~k=0,\cdots \] 当观测信号存在缺省值时,能否通过部分信号恢复完整信号?Cadzow算法的一种变体可很好地进行信号恢复。令\(\boldsymbol z_0=\mathcal P_\Omega(\boldsymbol x)\)迭代如下过程 \[ \boldsymbol z_{k+1} = \mathcal P_\Omega(\boldsymbol x)+(\mathcal I-\mathcal P_\Omega)\mathcal H^\dagger\mathcal T_r\mathcal H\boldsymbol z_k,~k=0,\cdots \] 其中第二项\(\mathcal H^\dagger\mathcal T_r\mathcal H\boldsymbol z_k\)用来更新\(\Omega^c\)的未知分量。如果观测信号被高斯噪声扰动,则可以把第一项改为\(\mathcal P_\Omega(\mathcal H^\dagger\mathcal T_r\mathcal H\boldsymbol z_k)\)来消除噪声的影响。
快速Cadzow算法
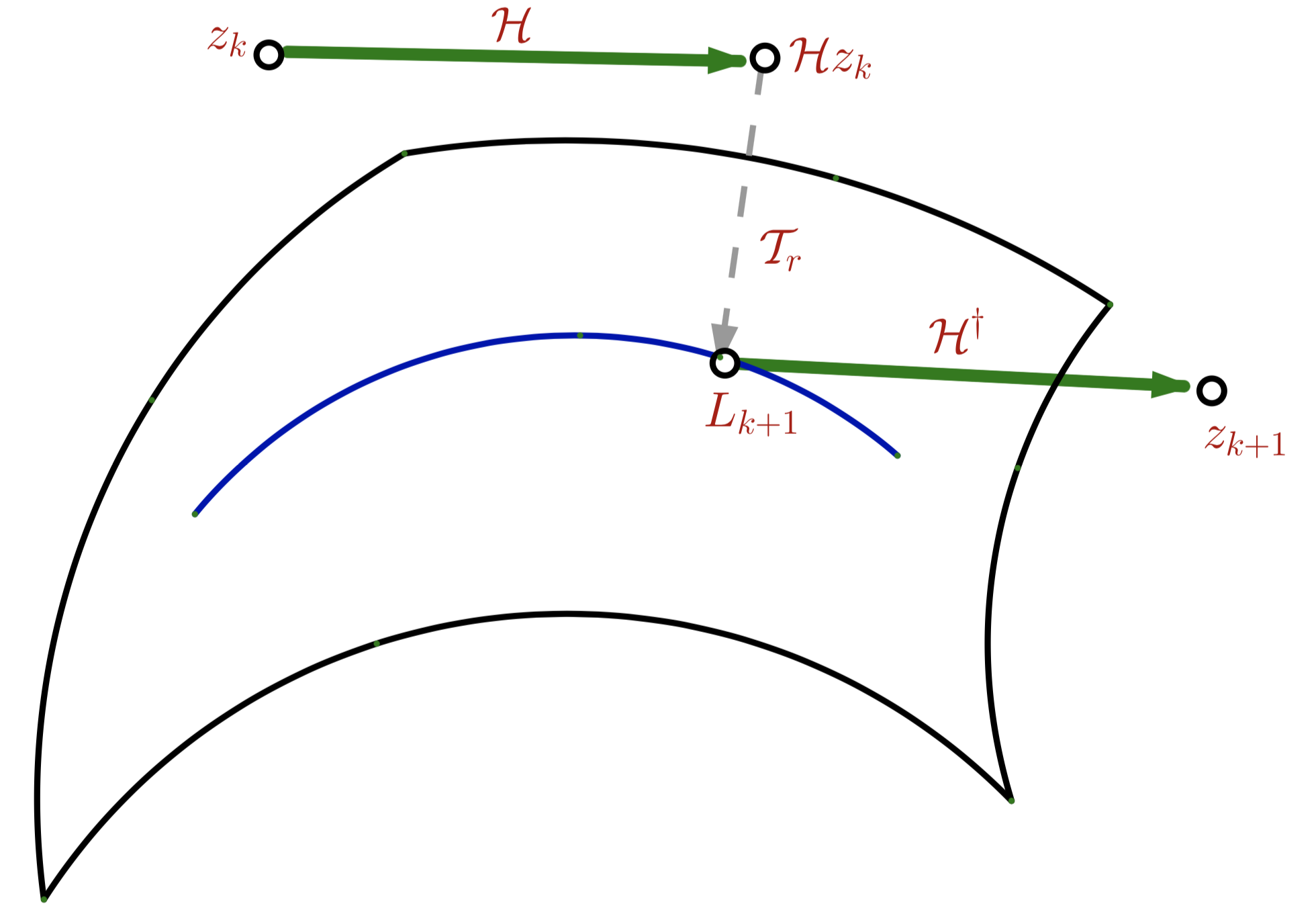
Cadzow算法图解
\[ \boldsymbol z_{k+1} = \mathcal H^\dagger\mathcal T_r\mathcal H\boldsymbol z_k,~k=0,\cdots \]
该算法里的Hankel化\(\mathcal H\)和逆Hankel化\(\mathcal H^\dagger\)是向量与矩阵间的转化,而奇异值分解则是对Hankel矩阵进行操作。从图中可以看见,投影是在对应集合中找到距离最近的点,对应点是投影点。
对于信号\(\boldsymbol z\in\mathbb C^{n}\),矩阵\(\mathcal H\boldsymbol z\in\mathbb C^{L\times K}\)的奇异值分解计算复杂度在\(\mathcal O(N^3)\)。为了加快收敛速度,可以在\(\mathcal H\boldsymbol z_k\)做一些改动,使得进行投影\(\mathcal P_{\mathcal M_r}\)时效率更高。那么最直接的方法就是改变矩阵的结构,在特定的子空间进行奇异值分解,利用代数的方法来降低整体迭代的计算复杂度。
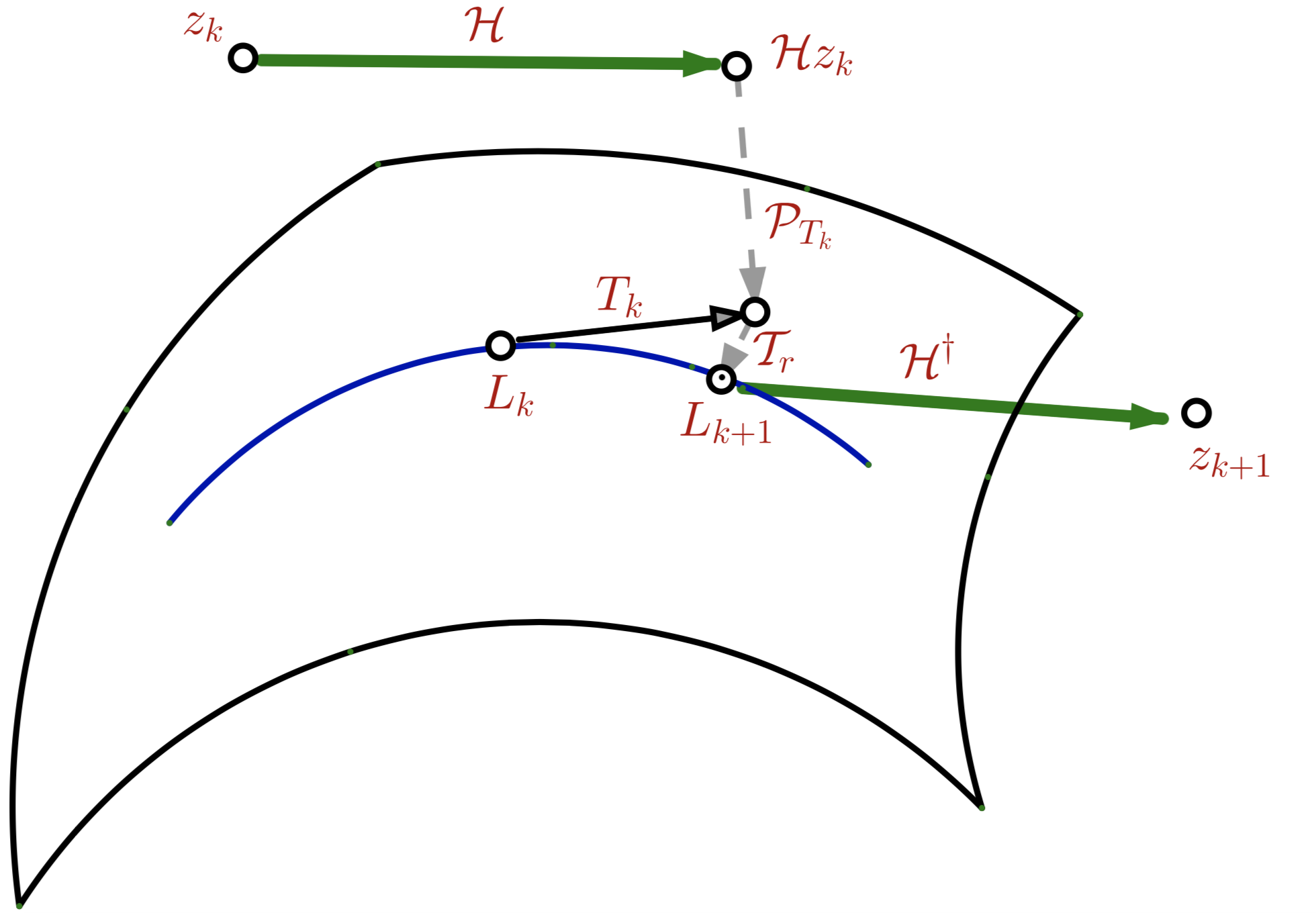
快速Cadzow算法图解
\[ \boldsymbol z_{k+1}=\mathcal H^\dagger\mathcal T_r\mathcal P_{T_k}\mathcal H\boldsymbol z_k \]
与Cadzow算法相比,快速在于多加了到子空间\(T_k\in\mathbb C^{L\times K}\)一个投影\(\mathcal P_{T_k}\),选择合适的子空间可以赋予\(\mathcal P_{T_k}\mathcal H\boldsymbol z_k\)利于分解的矩阵结构。
\(T_k\)的选择
前一个迭代点\(\boldsymbol z_{k}=\mathcal H^\dagger\mathcal T_r\mathcal P_{T_{k-1}}\mathcal H\boldsymbol z_{k-1}\)的秩\(r\)部分记为\(L_k = \mathcal T_r\mathcal P_{T_{k-1}}\mathcal H\boldsymbol z_{k-1}\),则\(L_k\)的简化奇异值分解为\(L_k=U_k\Sigma V_k^*\),则\(T_k\)可通过\(L_k\)的行、列子空间的直和来构造 \[ T_k = \{U_kB^*+CV_k^*~|~B\in\mathbb C^{K\times r},~C\in\mathbb C^{L\times r}\} \] 秩\(r\)矩阵形成一个光滑流形,而\(T_k\)是流形上点\(L_k\)处的切空间。有了子空间\(T_k\)后,任意点\(Z\in\mathbb C^{L\times K}\)到\(T_k\)的投影为 \[ \mathcal P_{T_k}(Z) = U_kU_k^*Z+ZV_kV_k^*-U_kU_k^*ZV_kV_k^*. \]
- 第一次迭代设置\(T_0\in\mathbb C^{L\times K}\),也就是说快速Cadzow算法与Cadzow算法第一步是一致的。
- 第\(k+1\)次迭代点的投影子空间\(T_k\)都是依赖第\(k\)次迭代点由奇异值分解得到正交子空间直和,这也解释了快速Cadzow算法图上的\(T_k\)为\(L_k\)的切空间。
- 当\(L_k\)具有近似Hankel矩阵结构时,\(\mathcal H\mathcal H^\dagger L_k\approx L_k\)且\(L_k\in T_k\),有\(\mathcal P_{T_k}\mathcal H\boldsymbol z_k\approx \mathcal H\boldsymbol z_k\),由此\(\mathcal H\boldsymbol z_k\)到\(T_k\)的投影能捕获其最大的能量。
算法复杂度
与矩阵\(\mathcal T_r\mathcal H\boldsymbol z_k\in\mathbb C^{L\times K}\)的奇异值分解相比,通过到\(T_k\)的投影,矩阵\(\mathcal T_r\mathcal P_{T_{k-1}}\mathcal H\boldsymbol z_{k-1}\)可化成\(2r\times 2r\)的奇异值分解。将快速Cadzow算法分解为三步: \[ \begin{cases} W_k = \mathcal P_{T_k}\mathcal H\boldsymbol z_k\\ L_{k+1} = \mathcal T_r W_k\\ \boldsymbol z_{k+1} =\mathcal H^\dagger L_{k+1}. \end{cases} \] 令\(H_k=\mathcal H\boldsymbol z_k\),得到到\(T_k\)的投影点 \[ \begin{aligned} W_k&=U_kU_k^*H_k+H_kV_kV_k^*-U_kU_k^*H_kV_kV_k^*\\ &=U_kU_k^*H_kV_kV_k^*+U_kU_k^*H_k(I-V_kV_k^*)+(I-U_kU_k^*)H_kV_kV_k^*\\ &=U_kGV_k^* + U_kB^*+CV_k^* \end{aligned} \] 其中 \[ \begin{aligned} G&=U_k^*H_kV_k\\ B&=(I-V_kV_k^*)H_k^*U_k\\ C&=(I-U_kU_k^*)H_kV_k \end{aligned} \] 对\(B\)和\(C\)进行QR分解 \[ \begin{aligned} B&=(I-V_kV_k^*)H_k^*U_k=Q_1R_1\\ C&=(I-U_kU_k^*)H_kV_k=Q_2R_2 \end{aligned} \] 则\(Q_1\perp V_k,\quad Q_2\perp U_k\),且 \[ \begin{aligned} W_k& = U_kGV_k^* + U_kR_1^*Q_1^*+Q_2R_2V_k^*\\ &=\begin{bmatrix}U_k & Q_2\end{bmatrix} \begin{bmatrix} G& R_1^*\\ R_2 & \boldsymbol {0} \end{bmatrix} \begin{bmatrix} V_k&Q_1 \end{bmatrix}^*\\ &=\left(\begin{bmatrix}U_k & Q_2\end{bmatrix}U_G\right)\Sigma_G\left(\begin{bmatrix} V_k&Q_1 \end{bmatrix}V_G\right)^* \end{aligned} \] 其中涉及一个\(2r\times 2r\)矩阵的奇异值分解 \[ \begin{bmatrix} G& R_1^*\\ R_2 & \boldsymbol {0} \end{bmatrix} = {U}_G\Sigma_G{V}_G^*. \] 因此总的计算复杂度为\(\mathcal O(Nr^2+Nr\log N+r^3)\),空间复杂度为\(\mathcal O(Nr)\)。
算法流程图
梯度方向
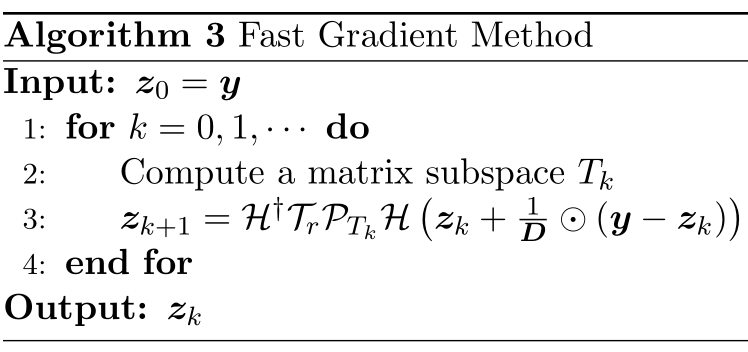
将Cadzow算法重新表示为 \[ \begin{aligned} Z_{k+1} &= \mathcal P_{\mathcal M_H}\mathcal P_{\mathcal M_r}Z_k\\ &=\mathcal P_{\mathcal M_H}\mathcal P_{\mathcal M_r}(Z_k+t(Y-Z_k)),\quad t=0, \end{aligned} \] 其中\(Z_k=\mathcal H\boldsymbol z_k\)和\(Y = \mathcal H\boldsymbol y=\mathcal H(\boldsymbol x+\boldsymbol e)\),则Cadzow算法可表示为一类投影梯度方法,其对应的优化问题为 \[ \min\frac{1}{2}\|Z-Y\|_F^2 ~\text{s.t}~ \text{rank}(Z)\leq r \text{ and }Z\text{ is Hankel} \] 由于Hankel矩阵端点效应,考虑如下重加权优化问题 \[ \min\frac{1}{2}\|\sqrt{W}\odot(Z-Y)\|_F^2 ~\text{s.t}~ \text{rank}(Z)\leq r \text{ and }Z\text{ is Hankel} \] 其中权值矩阵\(W\)为 \[ \begin{aligned} \sqrt{W}&=\mathcal H(\sqrt{w_0},\cdots,\sqrt{w_{N-1}})\\ &= \begin{bmatrix} 1 & \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{3}} & \vdots & \vdots\\ \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{3}}& \vdots & \vdots & \vdots\\ \frac{1}{\sqrt{3}} & \vdots & \vdots & \vdots &\frac{1}{\sqrt{3}}\\ \vdots & \vdots & \vdots & \frac{1}{\sqrt{3}} & \frac{1}{\sqrt{2}}\\ \vdots & \vdots & \frac{1}{\sqrt{3}} &\frac{1}{\sqrt{2}}& 1 \end{bmatrix}. \end{aligned} \] 令步长为1,则投影梯度法表示为 \[ Z_{k+1} = \mathcal P_{\mathcal M_H}\mathcal P_{\mathcal M_r}(Z_k+W\odot(Y-Z_k)). \] 记\(1/D = [1/w_0,\cdots,1/w_{N-1}]^\top\),Cadzow算法对应的梯度算法如下
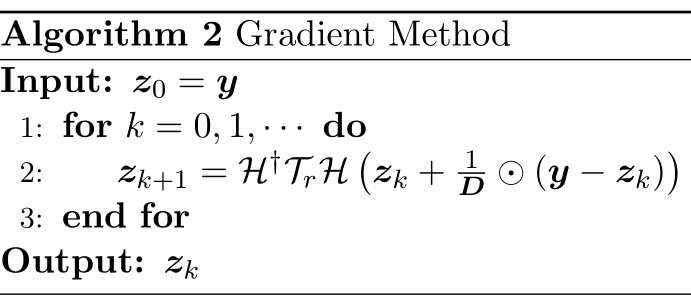
若引入投影子空间,则可得到快速Cadzow算法对应的快速梯度算法。
小结
下面会继续看一些低秩Hankel矩阵相关的文章。
References
- Jian-Feng Cai Homepage: http://www.math.ust.hk/~jfcai/ ↩︎
- H. Wang, J.-F. Cai, T. Wang, and K. Wei, Fast Cadzow's Algorithm and a Gradient Variant, arxiv preprint: 1906.03572. ↩︎
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
