基于黎曼几何的多分类算法
本文最后更新于:2020年12月24日 下午
写在前面
17年暑假的时候入门了SPD流形,现在打算慢慢拾起来。介绍一个传统机器学习到流形上衍生的文章。
- MDRM算法可以看出流形版本的1-NN,不过距离和中心都需要用黎曼度量来计算
- TSLDA算法是将流形点映射到均值点切空间上,欧式的判别分析就可以直接使用
SPD矩阵流形基础
SPD矩阵
对称正定矩阵定义为 \[ \mathcal S_n^{++} = \{P\in\mathbb R^{n\times n}| \boldsymbol{u}^TP \boldsymbol u \succ 0, \forall \boldsymbol u \in \mathbb R^n\} \] 对矩阵\(P\in \mathcal S_n^{++}\)进行特征分解 \[ P=U \text{diag}(\sigma_1,\ldots,\sigma_n)U^T \] 则矩阵指数算子和对数算子定义如下 \[ \begin{aligned} \exp(P) &= U \text{diag}(\exp(\sigma_1),\ldots,\exp(\sigma_n))U^T\\ \log(P) &= U \text{diag}(\log(\sigma_1),\ldots,\log(\sigma_n))U^T \end{aligned} \]
黎曼度量
\(\mathcal S_n^{++}\)是一个可微的黎曼流形,任意点\(P\in \mathcal S_n^{++}\)的导数构成的切空间\(T_P\)是一个对称矩阵空间。
在切空间任取两点\(S_1,S_2\in T_p\),可选择局部内积来定义SPD流形\(\mathcal S_n^{++}\)上的度量(natural metric) \[ \left\langle S_1, S_2\right\rangle_P = \text{tr}(S_1P^{-1}S_2P^{-1}) \] 该内积自然诱导出切空间的范数 \[ \|S\|_P^2 = \left\langle S, S\right\rangle_P = \text{tr}(SP^{-1}SP^{-1}) \] 当\(P=I\)时,该范数等价于Frobenius范数,即\(\|S\|_F^2 = \left\langle S, S\right\rangle_I\)。
黎曼距离
设流形上曲线\(\Gamma(t):[0,1]\to\mathcal S_n^{++}\)的起点\(\Gamma(0)=P_1\)和终点\(\Gamma(1)=P_2\),则曲线的长度可表示为积分形式 \[ L(\Gamma(t))=\int_0^1\|\dot\Gamma(t)\|_{\Gamma(t)} dt \] 其中\(\dot\Gamma(t)\in T_{\Gamma(t)}\)为切向量,\(\|\cdot\|_{\cdot}\)为切空间的范数。流形上连接\(P_1\)和\(P_2\)的最短长度曲线称为测地线。上述内积和范数可诱导出流形\(\mathcal S_n^{++}\)上的测地线距离,即黎曼距离。 \[ \delta_R^2 (P_1,P_2) = \|\log (P_1^{-1}P_2)\|_F^2 = \sum_{i=1}^n \log^2 \lambda_i \] 其中\(\lambda_i\)是\(P_1^{-1}P_2\)的第\(i\)个实特征值。该距离具有如下特性:
\[ \delta_R (P_1,P_2) = \delta_R (P_2,P_1) \]
\[ \delta_R (P_1,P_2) = \delta_R (P_1^{-1},P_2^{-1}) \]
\[ \delta_R (P_1,P_2) = \delta_R (W^TP_1W,W^TP_2W),\forall W\in \text{Gl(n)} \]
最后一个性质验证了仿射不变性(affine invariance),因此该黎曼度量也称为仿射不变黎曼度量(Affine Invariant Riemannian Metric, AIRM)。
投影映射
任取一点\(P\in\mathcal S_n^{++}\),切空间\(T_P\)由点\(P\)处的切向量\(S_i\)与\(S_i\)投影至流形点\(P_i=\text{Exp}_P(S_i)\)之间的关系如下: \[ \begin{aligned} &\text{Exp}_P(S_i)=P_i=P^{1/2}\exp\left(P^{-1/2} S_i P^{-1/2}\right)P^{1/2}\\ &\text{Log}_P(P_i)=S_i=P^{1/2}\log\left(P^{-1/2} P_i P^{-1/2}\right)P^{1/2} \end{aligned} \] 切空间是具有欧式度量的,因此到点\(P\)的黎曼距离可用点\(P\)处切空间上的欧式距离来计算 \[ \begin{aligned} \delta_R (P,P_i) &= \|\text{Log}_P(P_i)\|_P = \|S_i\|_P \\ &=\|\text{upper}(P^{-1/2}\text{Log}_P(P_i)P^{-1/2})\|_2 \end{aligned} \] 其中\(\text{upper}(\cdot)\)是一个矩阵化向量的算子,保留对称矩阵的上三角并向量化,且对角元赋权值\(1\)而非对角元赋权值\(\sqrt{2}\)。
均值
- 欧式均值(算术均值)
\[ \mathfrak{A}(P_1,\ldots,P_I)=\arg\min_{P\in\mathcal S_n^{++}}\sum_{i=1}^I \delta_E^2 (P,P_i) = \frac{1}{I}\sum_{i=1}^I P_i \]
- 黎曼均值(几何均值)
\[ \mathfrak{G}(P_1,\ldots,P_I)=\arg\min_{P\in\mathcal S_n^{++}}\sum_{i=1}^I \delta_R^2 (P,P_i) \]
尽管该问题理论上局部最小值存在且唯一,但没有闭解,因此需要使用迭代算法求解该最小化问题。
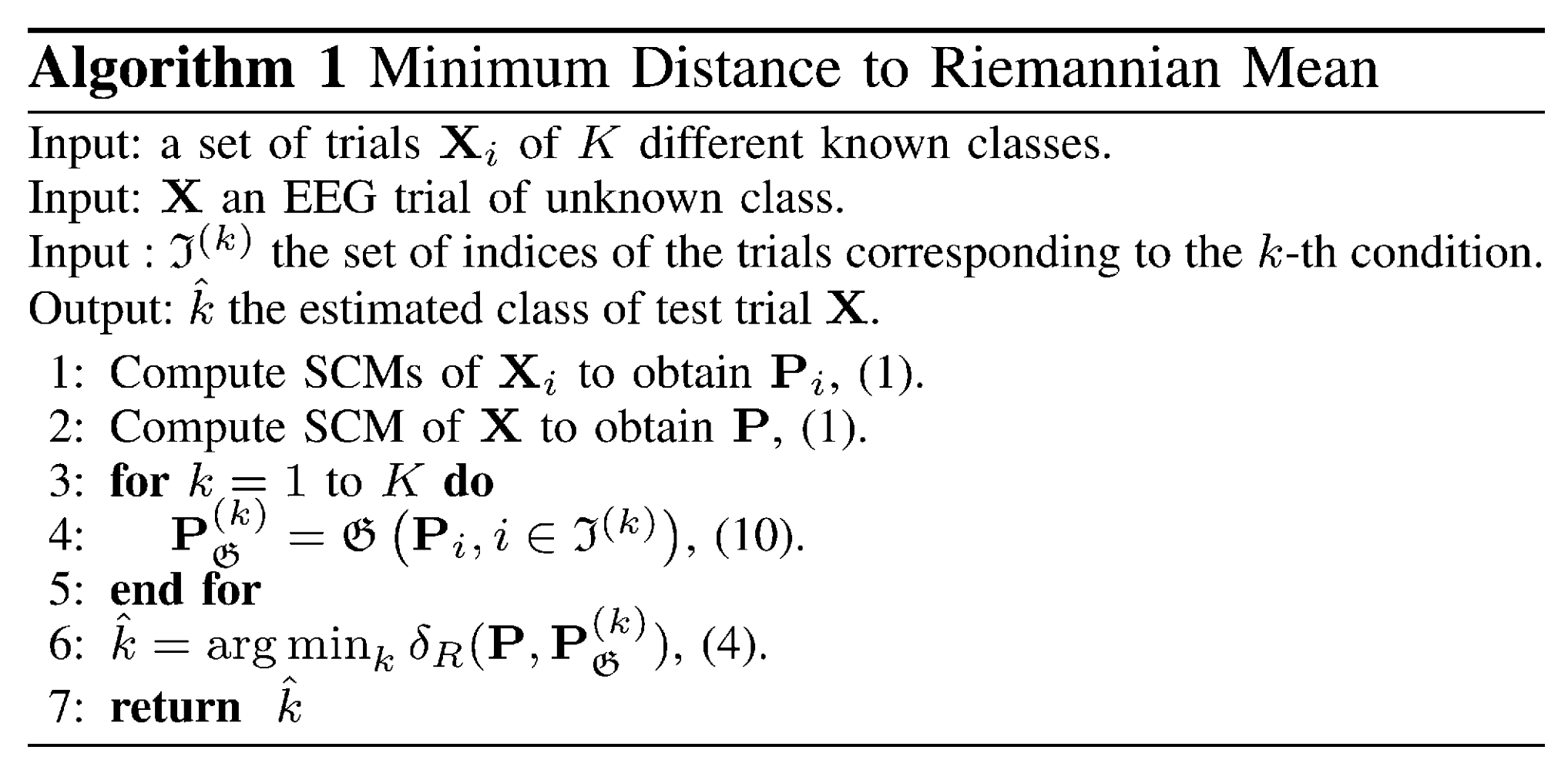
基于黎曼均值的最小距离
计算每个类信号协方差矩阵的几何均值点\(P_\mathfrak{G}^{(k)}\)
计算新样本点的协方差矩阵\(P\)与均值点最小距离从而判断类别信息
本质上就是SPD流形上的1-NN算法。算法流程如下:
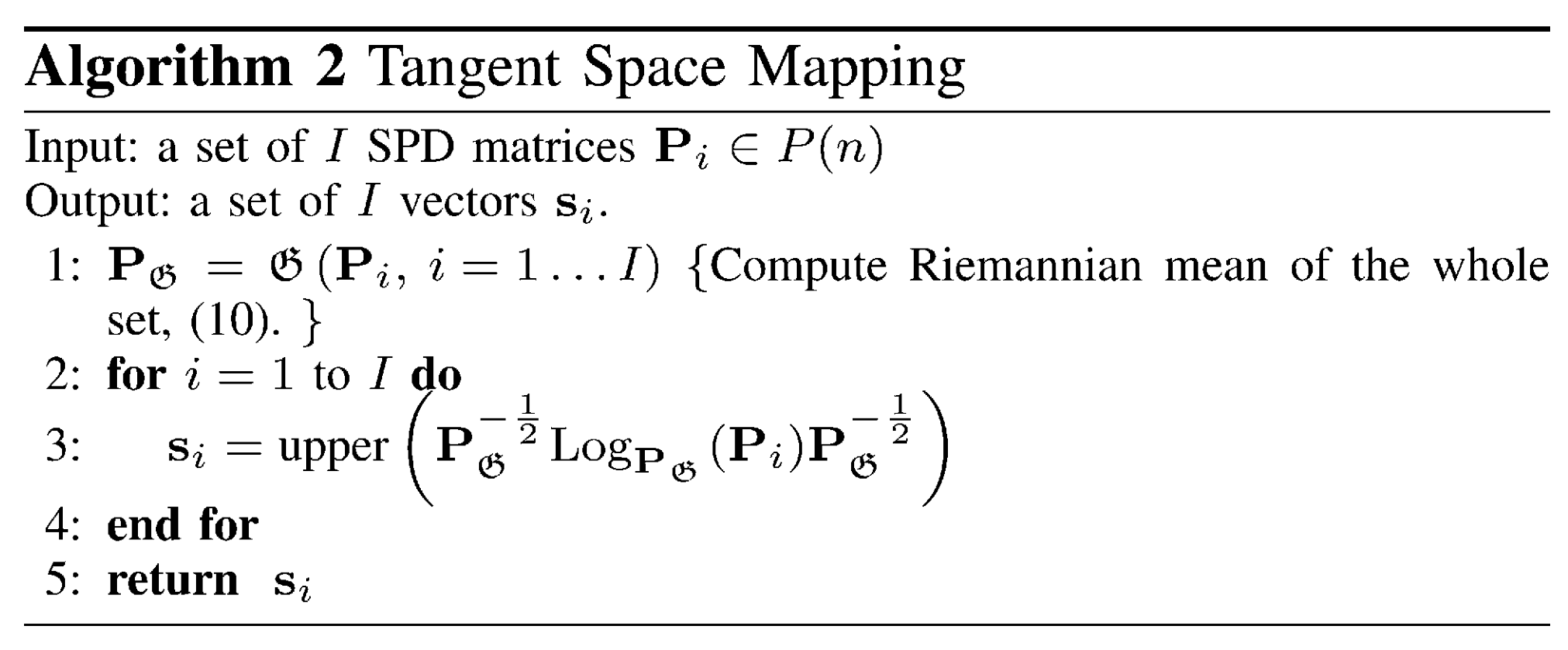
基于切空间的线性判别分析
首先将数据协方差矩阵投影至切空间上,那么选哪个点更合适?文章给出用全体协方差矩阵的黎曼均值点\(P_\mathfrak{G}=\mathfrak{G}(P_i)\)来构造切空间,投影点为 \[ s_i = \text{upper}(P_\mathfrak{G}^{-1/2}\text{Log}_{P_\mathfrak{G}}(P_i)P_\mathfrak{G}^{-1/2}) \] 这就完成了流形点到切空间的映射,映射具有保距性,流形的几何关系在切空间都得以保留。此外,流形上度量的计算需要复杂的矩阵分解,而欧式空间距离相对而言简单得多。因此用切空间近似黎曼几何具有非常大的潜力。下面是切空间映射算法流程:
投影至切空间后,传统的欧式分类算法可直接使用,文章使用经典的线性判别分析(LDA)来完成投影点的分类。
小结
上面介绍了流形上的分类算法,其中很大篇幅都是介绍流形上的操作,因此掌握了这些基础后可以尝试进行新的改进。不过鉴于文章是2012年发表的,后面已经有很多改进算法,能想到的和不能想到的估计都已经做遍了,所以简单的小改进是没多大意义的。这也反过来说明优秀的文章不仅仅需要找到合适的切入点,还需要符合时代的潮流。
References
- A. Barachant, S. Bonnet, M. Congedo and C. Jutten, Multiclass Brain–Computer Interface Classification by Riemannian Geometry, in IEEE Transactions on Biomedical Engineering, vol. 59, no. 4, pp. 920-928, April 2012, doi: 10.1109/TBME.2011.2172210. ↩︎
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
