L1/L2最小化的加速算法
本文最后更新于:2020年8月25日 中午
写在前面
介绍\(L_1/L_2\)最小化的加速算法 [1],我在本科的时候就开始跟着我的导师看娄易非老师的文章(\(\ell_1-\ell_2\)),现在虽然方向不一致,但是看文献总能学到新的技巧,我想以后会一直留意娄老师的最新文献的。附上娄老师主页[2]。
优化模型
\(L_0\)最小化
\[ \min_{\mathbf x \in \mathbb R^n} \|\mathbf x\|_0 \quad \text{s.t.} \quad A \mathbf x = \mathbf b \]
NP 难问题
- 贪婪算法(当\(n\)很大时,缺乏求解精度)
- 正交匹配追踪(OMP)
- 正交最小二乘(OLS)
- 采样匹配追踪(CoSaMp)
- 近似算法()
- 凸松弛:\(L_1\)替换\(L_0\)的基追踪(BP)
- 非凸松弛:多种改进
比率优化问题\(\frac{L_1}{L_2}\)
\[ \min_{\mathbf x \in \mathbb R^n} \frac{\|\mathbf x\|_1}{\|\mathbf x\|_2} \quad \text{s.t.} \quad A \mathbf x = \mathbf b \]
- 尺度不变性
- 不含参数
- 非凸的稀疏度度量
- 使用ADMM算法求解
引入两个辅助变量,构造增广的拉格朗日函数 \[ \begin{aligned} L(x,y,z,v,w) =& \frac{\|z\|_1}{\|y\|_2} + I(Ax-b) \\ &+ \frac{\rho_1}{2}\|x-y +\frac{1}{\rho_1}v\|_2^2 \\ &+ \frac{\rho_2}{2}\|x-z+\frac{1}{\rho_2}w\|_2^2 \end{aligned} \] 其中\(I(\cdot)\)为示性函数 \[ I(t) = \begin{cases} 0, & t = 0 \\ +\infty, & \text{otherwise} \end{cases} \]
混合优化问题\(L_1 - \alpha L_2\)
\[ \min_{\mathbf x \in \mathbb R^n} \|\mathbf x\|_1 - \alpha \|\mathbf x\|_2 \quad \text{s.t.} \quad A \mathbf x = \mathbf b \]
娄老师在这一问题上有很多成果,可以参考主页[2]。
联系
下面的性质给出比率模型\(\frac{L_1}{L_2}\)与混合模型\(L_1 - \alpha L_2\)之间的关系: \[ \begin{aligned} \alpha^* &= \inf_{\mathbf x} \left\{\frac{\|\mathbf x\|_1}{\|\mathbf x\|_2} \quad \text{s.t.} \quad A \mathbf x = \mathbf b \right\}\\ T(\alpha) &= \inf_{\mathbf x} \left\{\|\mathbf x\|_1 - \alpha \|\mathbf x\|_2 \quad \text{s.t.} \quad A \mathbf x = \mathbf b \right\} \end{aligned} \] 则
- 若\(T(\alpha) < 0\),则\(\alpha > \alpha^*\)。
- 若\(T(\alpha) \geq 0\),则\(\alpha \leq \alpha^*\)。
- 若\(T(\alpha) = 0\),则\(\alpha = \alpha^*\)。
这表明比率模型的最优值是\(T(\alpha)\)的根,因此可通过分半搜索(bisection search)来求得。
由向量范数的等价关系 \[ \|\mathbf x\|_2 \leq \|\mathbf x\|_1 \leq \sqrt{n}\|\mathbf x\|_2,\quad\forall \mathbf x \in \mathbb R^n \] 可以设置初始参数\(\alpha^{(0)} \in [1,\sqrt n]\),并根据\(T(\alpha^{(0)})\)进行分半搜索
若\(T(\alpha) = 0\),则混合模型的最优值是比率模型的最优值。
若\(T(\alpha) < 0\),则更新\(\alpha\)的范围\([\alpha^{(0)},\sqrt n]\)。
若\(T(\alpha) \geq 0\),则更新\(\alpha\)的范围\([1,\alpha^{(0)}]\)。因为在下一次迭代时,混合模型\(L_1 - \frac{\|x^{(k+1)}\|_1}{\|x^{(k+1)}\|_2}L_2\)的目标函数不超过\(0\),可进一步考虑区间\([1,\frac{\|x^{(k+1)}\|_1}{\|x^{(k+1)}\|_2}]\)。
更新范围后,选择区间断点的均值作为参数\(\alpha^{(1)}\),并迭代下去。
凸函数之差算法
对于非凸函数\(f(x)\),若存在两个凸函数\(g(x),h(x)\)满足\(f(x) = g(x) - h(x)\),那么如下优化问题 \[ \min_x f(x) \] 可通过对\(h(x)\)线性化,得到迭代DCA序列 \[ x^{(k+1)} = \arg\min_x g(x) - \left \langle x, \nabla h(x^{(k)} \right \rangle \]
求解算法
由于\(L_1 - \alpha L_2\)模型的目标函数可化成两个凸函数之差 \[ g(x) = \|x\|_1 + I(Ax-b), h(x) = \alpha\|x\|_2 \] 因此可通过如下DCA迭代序列求解\(L_1 - \alpha L_2\)模型 \[ x^{(k+1)} = \arg\min_x g(x) - \left \langle x, \frac{\alpha x^{(k)}}{\|x^{(k)}\|_2} \right \rangle \]
分半搜索算法流程
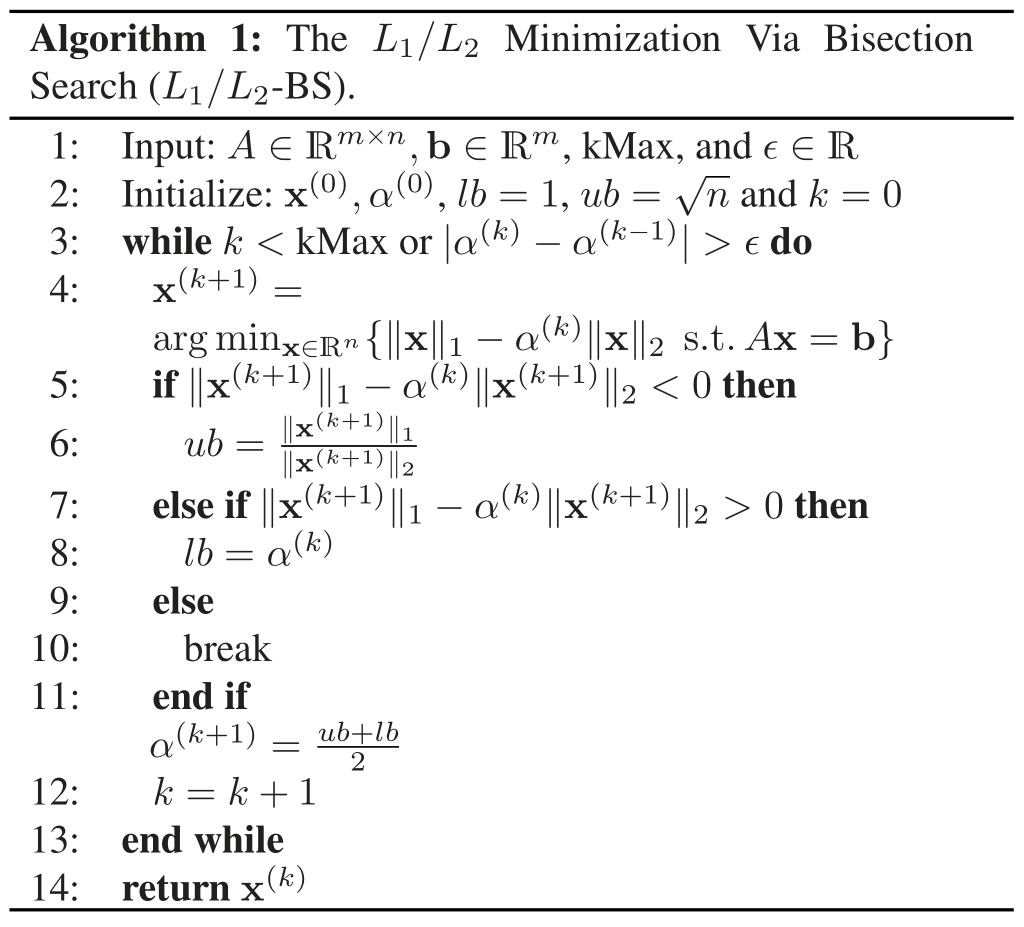
解释:
- line 2:\(lb,ub\)为参数\(\alpha\)的区间范围
- line 4:通过DCA序列求解混合模型
- line 11:通过区间的均值作为参数\(\alpha\)的更新
- 整个算法是基于比率模型和混合模型的解关系来设计的分半搜索
参数自适应迭代
用当前解的比率作为参数\(\alpha\)的更新,得到如下模型\((A1)\)
\[ \left\{\begin{array}{l} \mathbf{x}^{(k+1)}=\arg \min _{\mathbf{x}}\left\{g(\mathbf{x})-\left\langle\mathbf{x}, \frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}}\right\rangle\right\} \\ \alpha^{(k+1)}=\left\|\mathbf{x}^{(k+1)}\right\|_{1} /\left\|\mathbf{x}^{(k+1)}\right\|_{2} \end{array}\right. \]
求解\(\mathbf{x}\)的子问题是一个线性规划问题,但由于问题的无界性,不能保证最优解存在。下面整合一个二次项来增加模型的鲁棒性\((A2)\)
\[ \left\{\begin{array}{l} \mathbf{x}^{(k+1)}=\arg \min _{\mathbf{x}}\left\{g(\mathbf{x})-\left\langle\mathbf{x}, \frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}}\right\rangle+\frac{\beta}{2}\left\|\mathbf{x}-\mathbf{x}^{(k)}\right\|_{2}^{2}\right\} \\ \alpha^{(k+1)}=\left\|\mathbf{x}^{(k+1)}\right\|_{1} /\left\|\mathbf{x}^{(k+1)}\right\|_{2} \end{array}\right. \] - 模型\((A1)\)
\[ \arg \min _{\mathbf{x}} \|\mathbf{x}\|_1 + I(A\mathbf{x}-b)-\left\langle\mathbf{x}, \frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}}\right\rangle \]
任意实数(向量)可表示为两正数(向量)之差,可假设\(\mathbf{x} = \mathbf{x}^+ - \mathbf{x}^-\),其中\(\mathbf{x}^+,\mathbf{x}^- >0\),记\(\bar{\mathbf{x}} = [\mathbf{x}^+ ;\mathbf{x}^-]^T,\bar A = [A \quad -A]\),则模型\((A1)\)转化为 \[ \min_{\bar{\mathbf{x}} \geq 0} \left[1+\frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}};1-\frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}}\right]^T \bar{\mathbf{x}} \quad \text{s.t.} \quad \bar A \bar{\mathbf{x}} = \mathbf{b} \] 该线性规划问题可通过Gurobi求解器解决。
- 模型\((A2)\)
\[ \arg \min _{\mathbf{x}}\|\mathbf{x}\|_1 + I(A\mathbf{x}-b)-\left\langle\mathbf{x}, \frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}}\right\rangle+\frac{\beta}{2}\left\|\mathbf{x}-\mathbf{x}^{(k)}\right\|_{2}^{2} \]
引入二次项后,模型是一个二次规划问题,可通过ADMM算法求解。引入辅助变量并构造拉格朗日函数 \[ \begin{aligned} L_\rho (\mathbf x, \mathbf y, \mathbf u) =& \|\mathbf{y}\|_1 + I(A\mathbf{x}-b)-\left\langle\mathbf{x}, \frac{\alpha^{(k)} \mathbf{x}^{(k)}}{\left\|\mathbf{x}^{(k)}\right\|_{2}}\right\rangle\\ &+\frac{\beta}{2}\left\|\mathbf{x}-\mathbf{x}^{(k)}\right\|_{2}^{2} + \mathbf u^T(\mathbf x-\mathbf y) + \frac{\rho}{2}\left\|\mathbf{x}-\mathbf{y}\right\|_{2}^{2} \end{aligned} \] 对\(\mathbf x\)的子问题可视为\(Ax=b\)约束下的最小二乘问题,通过投影算子写成显式解;对\(\mathbf y\)的子问题是一类经典的\(\ell_1\)范数的优化问题,可通过软阈值算子写成其显式解。这里就不一一细说了。
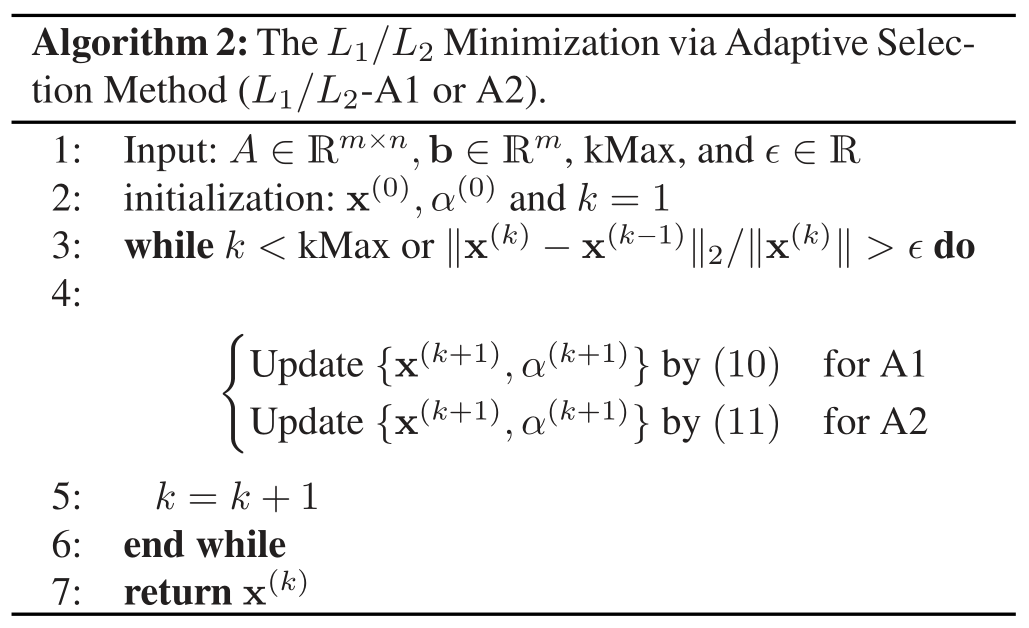
参数自适应迭代的算法流程
与其他工作的关联
文章算法与参数选择、广义逆幂和基于梯度的方法均产生关联,下面介绍后两种的联系
广义逆幂
逆幂方法是一种求解半正定对称矩阵的最小特征值方法,其通过迭代求解下面线性方程 \[ B\mathbf x^{(k+1)} = \mathbf x^{(k)} \] 记迭代收敛结果(即最小特征值对应的特征向量)为\(\mathbf x^*\),则最小特征值估计为\(\lambda = q(\mathbf x^*)\),其中\(q(\cdot)\)为瑞利商 \[ q(\mathbf x) = \frac{\left\langle\mathbf x,B\mathbf x\right\rangle}{\|\mathbf x\|_2^2} \] 迭代求解线性方程等价为如下优化问题 \[ \mathbf x^{(k+1)} = \arg\min_{\mathbf x}\frac{1}{2}\left\langle\mathbf x,B\mathbf x\right\rangle-\left\langle\mathbf x^{(k)},\mathbf x\right\rangle \] 以上思路可以推广至非线性情形,得到广义逆幂方法。对任意函数\(r(\cdot), s(\cdot)\),考虑一个广义的商函数 \[ q(\mathbf x) = \frac{r(\mathbf x)}{s(\mathbf x)} \] 以及对应优化问题和特征值的更新 \[ \left\{\begin{array}{l} \mathbf{x}^{(k+1)}=\arg\min_{\mathbf x}r(\mathbf x)- \lambda^{(k)}\left\langle \nabla s(\mathbf x^{(k)}),\mathbf x\right\rangle \\ \lambda^{(k+1)}=r(\mathbf{x}^{(k+1)})/s(\mathbf{x}^{(k+1)}) \end{array}\right. \] 显然,当\(r(\mathbf{x}) = g(\mathbf{x}),s(\mathbf{x}) = \|\mathbf{x}\|_2,\lambda = \alpha\)时,以上广义逆幂与模型\((A1)\)一致。通过最速下降流(steepest descent flow)整合二次项则得到模型\((A2)\)。
梯度方法
回到比率优化问题\(\frac{L_1}{L_2}\) \[ \min_{\mathbf x \in \mathbb R^n} \frac{\|\mathbf x\|_1}{\|\mathbf x\|_2} \quad \text{s.t.} \quad A \mathbf x = \mathbf b \]
根据KKT条件,\(\mathbf x^*\neq \mathbf 0\)是优化问题的临界点当且仅当存在向量\(\mathbf s\)满足 \[ \left\{\begin{array}{l} 0 \in \frac{\partial\left\|\mathbf{x}^{*}\right\|_{1}}{\left\|\mathbf{x}^{*}\right\|_{2}}-\frac{\left\|\mathbf{x}^{*}\right\|_{1}}{\left\|\mathbf{x}^{*}\right\|_{2}^{2}} \frac{\mathbf{x}^{*}}{\left\|\mathbf{x}^{*}\right\|_{2}}+A^{T} \mathbf{s} \\ 0=A \mathbf{x}^{*}-\mathbf{b} \end{array}\right. \] 对向量缩放\(\hat{\mathbf s} = \|\mathbf{x}^{*}\|_2 \mathbf s\),第一个次梯度条件为 \[ 0 \in \partial\left\|\mathbf{x}^{*}\right\|_{1}-\frac{\left\|\mathbf{x}^{*}\right\|_{1}}{\left\|\mathbf{x}^{*}\right\|_{2}} \frac{\mathbf{x}^{*}}{\left\|\mathbf{x}^{*}\right\|_{2}}+A^{T} \hat{\mathbf{s}} \] 该最优性条件往往也对应符合此梯度相同的其他优化问题 \[ \min_{\mathbf x} g(\mathbf x) + w(\mathbf x) \] 其中\(w(\cdot)\)的形式无法明确确定,但仅需要其梯度信息 \[ \begin{aligned} g(\mathbf{x}) &= \|\mathbf{x}\|_1 + I(A\mathbf{x}-\mathbf{b})\\ \nabla w(\mathbf{x}) &= -\frac{\left\|\mathbf{x}\right\|_{1}}{\left\|\mathbf{x}\right\|_{2}} \frac{\mathbf{x}}{\left\|\mathbf{x}\right\|_{2}} \end{aligned} \] 对于该优化问题,采用近邻梯度法(proximal gradient)得到迭代 \[ \mathbf x^{(k+1)} = \textbf{prox}_{\frac{g}{\beta}} (\mathbf x^{(k)} - \frac{1}{\beta}\nabla w(\mathbf x^{(k)})) \] 其中近邻算子为 \[ \textbf{prox}_g (\mathbf y) = \arg\min_{\mathbf z} g(\mathbf z) + \frac{1}{2}\|\mathbf z-\mathbf y\|_2^2 \] 这与模型\((A2)\)相同,因此模型\((A2)\)可以被理解为一种梯度下降方法。
这些一致性为算法的收敛性提供了良好的性质,至于收敛性就不细说了。
参考文献
- C. Wang, M. Yan, Y. Rahimi and Y. Lou. Accelerated Schemes for the L1/L2 Minimization, IEEE Transactions on Signal Processing, vol. 68, pp. 2660-2669, 2020. ↩︎
- 娄易非老师主页: https://sites.google.com/site/louyifei ↩︎
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
